.")
Regulacja temperatury, wilgotności, ciśnienia, pH i wielu innych wielkości procesowych odbywa się z wykorzystaniem różnego rodzaju urządzeń takich jak: elektroniczne regulatory PID, termoregulatory, sterowniki, kontrolery, programatory, itp. Są to głównie różnego rodzaju przemysłowe regulatory temperatury wyposażone w algorytm regulacji PID, PD, PI, P (lub regulację typu włącz/wyłącz (ON/OFF)), regulatory programowalne (z rampą programową i regulacją programową), regulatory procesowe z uniwersalnym wejściem pomiarowym, wielofunkcyjne i wielokanałowe kontrolery temperatury, mikroprocesorowe sterowniki temperatury, elektroniczne termoregulatory, programatory temperatury oraz cyfrowe termostaty. ACSE Sp. z o.o. oferuje przede wszystkim przemysłowe regulatory temperatury i procesu PID do zabudowy panelowej (regulatory tablicowe) jak i regulatory do montażu szynie DIN (regulatory PID na szynę), które mogą być montowane w szafach i panelach sterowniczych.
Przemysłowe regulatory temperatury PID wyposażone są w uniwersalne wejście pomiarowe, dzięki czemu nasze wielofunkcyjne regulatory temperatury mogą służyć zarówno do regulacji temperatury, a także do kontroli, regulacji i sterowania wilgotnością, ciśnieniem, przepływem, pH oraz wieloma innymi parametrami procesowymi. Dlatego nasze regulatory temperatury to również tzw. procesowe regulatory PID. Regulacja, sterowanie oraz kontrola temperatury i procesów przemysłowych to główne zadanie większości przemysłowych procesów technologicznych.
Nasze przemysłowe regulatory temperatury PID oprócz uniwersalnego wejścia pomiarowego wyposażone są standardowo w zaawansowany algorytm regulacji PID , wyjście lub wyjścia regulacyjne oraz wyście zdarzeń (alarmowe). Typ wyjścia regulacyjnego regulatora należy określić podczas zamawiania. Takie rozwiązanie czyni nasze regulatory PID uniwersalnymi urządzeniami, które mogą być zastosowane w różnych aplikacjach, głównie do pomiaru, regulacji, sterowania i kontroli temperatury.
Uniwersalne wejście pomiarowe, w które wyposażone są nasze regulatory temperatury PID obsługuje zarówno rezystancyjne czujniki temperatury RTD (Pt100), termopary (J, K, N, R, S, i B), jak i standardowe sygnały analogowe, w które wyposażone są różnego rodzaju przetworniki pomiarowe. Nasze wielofunkcyjne regulatory temperatury mogą być wyposażone w różnego typu wyjścia regulacyjne (np. przekaźnikowe, napięciowe logiczne (do SSR) lub analogowe liniowe (4…20mA, 0…10V), a także wejścia binarne, wyjścia zdarzeń (alarmowe), interfejsy komunikacyjne, itp.
Typowy układ regulacji temperatury składa się z czujnika pomiarowego (mogą to być czujniki temperatury Pt100, termopary lub przetwornik z standardowym sygnałem analogowy), elektronicznego regulatora temperatury (np. z algorytmem regulacji PID) oraz elementu wykonawczego (np. przekaźnika, stycznika, tyrystorowego regulatora mocy, falownika czy też napędu zaworu regulacyjnego).
.")
W dużym uproszczeniu przemysłowy regulator temperatury ma za zadanie mierzyć regulowaną temperaturę (wartość procesu (PV)) za pomocą zewnętrznego czujnika lub przetwornika, a następnie zmierzoną temperaturę porównać z wartością zadaną procesu regulacji (SV). Na podstawie różnicy temperatury i wyznaczonych parametrów PID regulator wysłała do elementu wykonawczego sygnał sterujący (regulacyjny). Wielkość sygnału regulacyjnego zależy między innymi od odchyłki pomiędzy wartością zadaną i wartością mierzoną. Następnie element wykonawczy odpowiednio włącza/wyłącza urządzenie wykonawcze (np. zasilnie grzałki), uruchamia silnik lub otwiera/zamyka zawór regulacyjny.
Przebieg procesu regulacji może być różny i zależy głównie od regulowanego procesu, regulowanego obiektu, ustawień regulatora, wybranej metody regulacji, itp.
Przebieg teoretycznego procesu regulacji przedstawia poniższy rysunek, jest to tak zwany przepadek regulacji idealnej (w warunkach bez żadnych zakłóceń). Dla tego typu regulacji następuje natychmiastowa zmiana wartości regulowanej z wartości A do B. Przedstawiony przepadek regulacji nie posiada żądanych przeregulowań, ani opóźnień. W rzeczywistości taki rodzaj regulacji jest niemożliwy, gdyż na przebieg procesu regulacji wpływa wiele różnych czynników zewnętrznych, takich jak: pojemność cieplna, charakterystyka statyczna i dynamiczna regulowanego obiektu oraz różne zakłócenia procesu regulacji.
.")
Na poniższym rysunku przedstawiono przebieg procesu regulacji zbliżony do idealnego, który jest celem standardowej regulacji (bez przeregulowań i z szybkim czasem dojścia do wartości zadanej).
.")
W zależności od regulowanego obiektu dla niektórych procesów regulacji wymagana jest regulacja bez przeregulowań, która jest do osiągnięcia ale kosztem wolnej zmiana wartości regulowanej w czasie (patrz poniższy rysunek).
.")
W niektórych przypadkach wymagana jest duża szybkość regulacji (dojścia do wartości zadanej regulacji), nawet kosztem powstania przeregulowań lub niedoregulowań (patrz poniższy rysunek).

Aby zapewnić optymalny przebieg procesu regulacji wymagana jest szeroka wiedza na temat działania regulatora PID, znajomość obiektu regulowanego, elementów pomiarowych, elementów wykonawczych użytych w regulowanym procesie, a także duże doświadczenie w budowie i obsłudze układów regulacji np. temperatury.
Ponieważ na przebieg procesu regulacji ma wpływ wiele czynników zewnętrznych, dlatego nasze mikroprocesorowe regulatory temperatury zostały standardowo wyposażone w różne algorytmy regulacji. Oprócz prostego algorytmu regulacji typu włącz/wyłącz (z ustawioną histerezą), nasze regulatory wyposażone są wiele innych rozbudowanych algorytmów regulacji np. 2DOF PID, PID, PD, PI lub P. Wybór odpowiedniego algorytmu regulacji zależy obiektu regulowanego oraz celu regulacji. Stosowanie zaawansowanych algorytmów regulacji podczas regulacji temperatury ma na celu przyspieszenie samego procesu regulacji, a także ograniczenie występowania przeregulowań i niedoregulowań. Najczęściej stosowanym i najbardziej uniwersalnym algorytmem regulacji, w który wyposażony jest obecnie każdy nasz regulator temperatury jest algorytm regulacji PID (tzw. regulator proporcjonalno – całkująco – różniczkujący).
Regulacja typu włącz/wyłącz jest najprostszą metodą regulacji, charakteryzują ją przeregulowania i oscylacje wartości regulowanej. Gdy wartość mierzona (PV) przez regulator jest mniejsza od wartości zadanej procesu regulacji (SV), wyjście regulacyjne jest włączone. Natomiast, gdy wartość mierzona przez regulator jest większa niż ustawiona wartość zadana, wyjście regulacyjne jest wyłączone. Podczas regulacji typu włącz/wyłącz (ON/OFF) powstają przeregulowania oraz oscylacje, dlatego taki typ regulacji nie jest zalecany, gdy wymagana jest duża dokładność i stabilność regulacji.

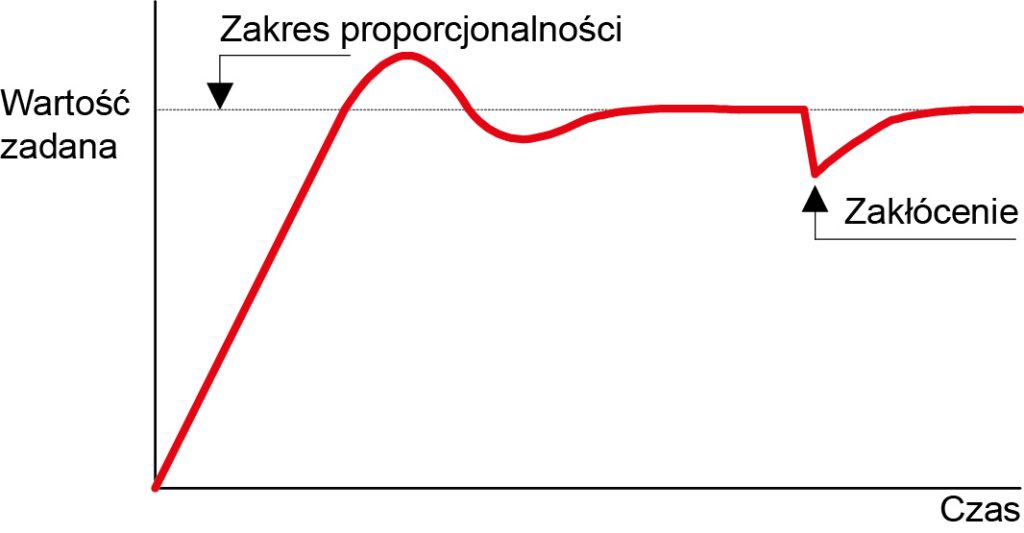
Podczas regulacji proporcjonalnej, wartość sygnału regulacyjnego jest proporcjonalna do odchyłki pomiędzy wartością regulowaną, a wartością zadaną w ustawionym zakresie proporcjonalności. Wyjście regulacyjne pozostaje włączone aż do momentu, gdy wartość regulowana nie osiągnie punktu A (zakresu działania proporcjonalności). Gdy wartość regulowana przekroczy punkt A (wejdzie w zakres działania zakresu proporcjonalności), wyjście regulatora będzie na przemian włączane i wyłączane. Gdy wartość regulowana zbliża się do wartości zadanej czas załączania wyjścia regulacyjnego ulega skróceniu, a czas wyłączenia wyjścia regulacyjnego ulega wydłużeniu. Regulacja proporcjonalna jest podobna do regulacji typu włącz/wyłącz (ON/OFF) z tą różnicą, że podczas regulacji proporcjonalnej nie występują przeregulowania, a oscylacje mają mniejszą częstotliwość. Wadą regulacji proporcjonalnej jest offset (stały błąd regulacji). Nasze regulatory wyposażone są w zależności od modelu w funkcję automatycznego lub ręcznego kasowania offsetu. Podczas regulacji proporcjonalnej, gdy zakres proporcjonalności jest poszerzany, czas dojścia wartości regulowanej do wartości zadanej zwiększa się oraz zwiększa się offset regulacji. Natomiast, gdy zakres proporcjonalności jest zawężany, czas dojścia wartości regulowanej do wartości zadanej skraca się, zmniejsza się offset, natomiast zwiększa się częstotliwość oscylacji. Gdy zakres proporcjonalności zostanie mocno zawężony, działanie regulacji będzie zbliżone do regulacji włącz/wyłącz (ON/OFF).

Działanie całkujące (I) regulatora PI automatycznie koryguje offset spowodowany działaniem proporcjonalnym. Wymagany jest jednak pewien czasu do ustabilizowania się wartości regulowanej na poziomie wartości zadanej podczas, gdy wystąpi gwałtowna zmiana wartości regulowanej spowodowana jakimś zakłóceniem procesu regulacji.
Regulacja ta jest porównywalna do regulacji typu proporcjonalnego (P), jednak odpowiedź regulatora na zmianę wartości regulowanej spowodowaną zakłóceniem jest znacznie szybsza, a wartość regulowana może być ustabilizowana w krótszym czasie, a co za tym idzie może być poprawiona charakterystyka przejściowa układu regulacji.

Regulacja PID jest połączeniem wszystkich powyższych typów regulacji. Jest podstawowym algorytmem regulacji we wszystkich naszych regulatorach procesowych. W regulatorze PID działanie proporcjonalna (P) zapobiega przeregulowaniom i oscylacjom, działanie całki (I) koryguje offset, a działanie różniczki (D) zapobiega zmianom wartości regulowanej w wyniku zakłóceń. Tak, więc, zastosowanie regulatora PID umożliwia optymalny przebieg procesu regulacji.

Regulacja PID z dwoma stopniami swobody (podwójny regulator PID) to najnowszy algorytm regulacji oferowany przez regulatory produkcji Shinko Technos. Algorytm ten poprawia charakterystykę regulacji i tłumi zakłócenia spowodowane zmianą wartości zadanej (SV). Dwa stopnie swobody oznaczają, że więcej niż dwie cechy mogą być regulowane jednocześnie i niezależnie od siebie. Korekta charakterystyki po zmianie wartości zadanej (SV), może być regulowana poprzez ustawienie współczynnika działania proporcjonalnego 2DOF (α). Natomiast do tłumienia zakłóceń służy współczynnik całkowania 2DOF (β).

Gdzie:
Optymalizację parametrów regulacji PID można wykonać ręcznie lub automatycznie za pomocą automatycznej funkcji auto-tuningu. Wszystkie nastawy PID oddziałują pomiędzy sobą, należy, więc każdorazowo wprowadzać zmiany tylko jednego parametru PID obserwując proces regulacji. Parametry najlepiej jest dobierać, zmieniając wartość ustawianego parametru na dwa razy większą lub dwa razy mniejszą. Regulator temperatury z dobrze dobranymi parametrami PID szybko dochodzi do wartości zadanej, jak również nie powoduje przeregulowań i niedoregulowań.
W celu automatycznego doboru optymalnych parametrów regulacji P, I, D i ARW regulator temperatury sztucznie wywołuje fluktuację. Standardowo proces auto-tuningu AT wywołuje fluktuacje wokół wartości zadanej [SV] zgodnie z poniższymi warunkami [A], [B] i [C]. Jedna z poniższych typów fluktuacji jest automatycznie wybierana w zależności od odchyłki pomiędzy wartością zadaną i mierzoną.
[A] – Jeżeli występuje duża różnica pomiędzy wartością zadaną i mierzoną podczas jej narastania (gdy ustawiono przesunięcie punktu pracy auto-tuningu (AT) na 20°C), proces auto-tuningu będzie wywoływał fluktuacje w pobliżu temperatury o 20°C poniżej wartości zadanej (SV).

(1) Obszar obliczania parametrów PID.
(2) Zakończenie procesu obliczania parametrów PID.
(3) Regulacja z obliczonymi parametrami PID.
(4) Wartość przesunięcia punktu pracy auto-tuningu (domyślnie: 20°C).
[B] Gdy regulacja jest wykonywana na poziomie wartości zadanej. Proces auto-tuningu AT wywołuje fluktuacje wokół wartości zadanej SV.

(1) Obszar obliczania parametrów PID.
(2) Zakończenie procesu obliczania parametrów PID.
(3) Regulacja z obliczonymi parametrami PID.
[C] Jeżeli występuje duża różnica pomiędzy SV i PV podczas jej opadania (gdy ustawiono przesunięcie punktu pracy auto-tuningu (AT) na 20°C), proces auto-tuningu będzie wywoływał fluktuacje w pobliżu temperatury o 20°C wyższej niż wartość zadana SV.

(1) Obszar obliczania parametrów PID.
(2) Zakończenie procesu obliczania parametrów PID.
(3) Regulacja z obliczonymi parametrami PID.
(4) Wartość przesunięcia punktu pracy auto-tuningu (domyślnie: 20°C).
Auto-reset może być wykonany tylko dla regulacji typu PD. Auto-reset jest wykonywany w celu korekcji offsetu (błędu) w punkcie, dla którego wartości regulacji jest ustabilizowana oraz znajduje się w zakresie proporcjonalności. Po wykonaniu auto-resetu, nie jest konieczne wykonywanie auto-resetu tak długo jak proces nie ulegnie zmianie.


Na podstawie przebiegu odpowiedzi skokowej rzeczywistego obiektu należy wyznaczyć stałą czasową [T] i opóźnienie układu [L] jak pokazano na rysunku.

Wzory do wyznaczenia parametrów z wykresu
P = (100/1.2) x N x L (%)
N = (S/T) x 1/(zakres temperatury)
I = 2L
D = 0,5L
Przykład: Ustawiony zakres temperatury wynosi 400°C
L = 30s
S/T = 1°C/1s (temperatura rośnie 1°C na sekundę)
Parametry PID obliczamy przy użyciu powyższych wzorów:
P = (100/1.2) x 1 x (1/400) x 30 = 6.25 (%)
I = 2L = 60s
D = 0.5L = 15s
Wyjścia alarmowe przeznaczone są do sygnalizacji stanów alarmowych lub sygnalizacji jakiś zdarzeń. Nasze umieralne regulatory PID posiadają co najmniej jedno wyjście alarmowe (lub więcej), którego funkcja jest konfigurowana. Sposób działania wyjścia alarmowego będzie zależeć od wybranego typu alarmu. Ogólnie wyjście alarmowe będzie aktywowane, gdy wartość regulowana przekroczy (w górę / w dół ) ustawioną wartość odchyłki lub progu. Dla wyjścia alarmowego mogą być wybrane następujące sposoby działania wyjścia.

Regulacja tójstawna krokowa (trójpołożeniowa) przeznaczona jest do regulacji temperatury za pomocą sterowania napędami zaworów i przepustnic regulacyjnych. W naszych regulatorach trójstawno krokowych dostępne są dwa algorytmy regulacji krokowej przeznaczone do sterowania siłownikami zaworu:
W przypadku regulacji trójstawnej krokowej bez sprzężenia zwrotnego sygnał regulacyjny (sterujący) jest przeliczany na czas załączenia przekaźników otwierania i zamykania w odniesieniu do ustawionego czasu pełnego otwarcia i zamknięcia zaworu. Do sterowania tójstawnego krokowego (trójpołożeniowego) zaworem wykorzystuje się najczęściej regulator typu PD.
")
Rampa to funkcja regulatora polegająca na tym, że wartość regulowana dochodzi stopniowo do nowej wartości zadanej zgodnie z ustawioną prędkością (np. 10°C/min.). Rozróżnia się rampę narastającą (gdy wartość regulowana dochodzi do nowej wartości zadanej) oraz rampę opadającą (gdy wartość regulowana opada do nowej wartości zadanej). Rampa jest charakterystyczną funkcją dla programowalnych regulatorów procesu.
Regulacja programowa wg krzywej jest podstawową cechą naszych regulatorów programowalnych. Podczas regulacji programowej, zmiana wartości zadanej regulatora odbywa się proporcjonalnie pod wpływem upływającego czasu oraz zgodnie z ustawioną krzywą programową. Wartość regulowana temperatury zmienia się zgodnie z ustawioną wartością zadaną oraz czasem dojścia do niej (lub utrzymania). Temperatura zadana na końcu kroku i czas dojścia do tej temperatury są ustawiane niezależnie dla każdego kroku programu. W zależności od modelu, nasze regulatory programowalne są dostępne z różną ilością programów (krzywych programowych) oraz różną ilością odcinków czasowych (kroków) w programie. Przykładowo programowalny regulator temperatury z serii PCB1 posiada możliwość ustawienia max 10 programów (profili temperaturowych), a każdy program może się składać z max 10 kroków (odcinków czasowych). Natomiast regulator programowalny PCA1 posiada 16 programów, gdzie każdy program może się składać z max 16 odcinków czasowych. Ponadto programy można z sobą łączyć z sobą lub je automatycznie powtarzać. Daje to możliwość ustawienia krzywej programowej składającej się max z 320 punktów temperatury.

Programowalne regulatory temperatury w zależności od modelu mogą być wyposażone w następujące funkcje:
Nasze regulatory programowalne podczas regulacji programowej umożliwiają włączenie (lub wyłączenie) funkcji oczekiwania dla każdego kroku programu. Działanie funkcji oczekiwania regulatora polega na tym, że regulator podczas regulacji programowej nie przejdzie do realizacji następnego kroku, jeżeli wartość regulowana na końcu kroku nie znajdzie się w ustawionym przedziale (wartość zadana na końcu kroku minus ustawiona wartości oczekiwania).

Zaletą regulacji kaskadowej jest możliwość użycia jednocześnie dwóch regulatorów PID, co skutkuje polepszonym rezultatem regulacji. W układzie regulacji kaskadowej regulatory PID pracują taki sposób, że jeden z nich reguluje wartość zadaną procesu, a drugi odpowiada za regulację odchyłki. Jeden regulator PID działa, jako regulator pętli zewnętrznej, która steruje parametrami fizycznymi procesu (np. przepływem). Drugi regulator działa, jako regulator pętli wewnętrznej, odbiera wartość sygnału regulacyjnego z regulatora pętli zewnętrznej, jako wartość zadaną dla wewnętrznej pętli regulacji (zwykle sterując parametrem, który podlega szybszym zmianom).
W przypadku stosowania kaskadowej regulacji PID wzrasta częstotliwość pracy regulatora, a co za tym idzie stała czasowa regulowanego obiektu ulega skróceniu. W przypadku regulacji kaskadowej regulatorem głównym (pętli zewnętrznej) jest najczęściej regulator PI lub PID, a regulatorem pętli wewnętrznej najczęściej jest regulator typu P.

Regulacja wielostrefowa temperatury jest możliwa przy wykorzystaniu zaawansowanego regulatora programowalnego (mastera) z funkcją cyfrowej transmisji wartości zadanej (tzw. SVTC) oraz prostych regulatorów temperatury (sleve) wyposażonych w interfejs RS485. Interfejs RS485 umożliwia cyfrową transmisję wartości zadanej z regulatora programowalnego do innych regulatorów (max 31) z interfejsem RS485. Funkcja ta umożliwia zdalne sterowanie wartością zadaną wielu regulatorów (stref grzejnych) z jednego regulatora programowalnego. Dla każdej strefy może być ustawiona również niezależna wartość przesunięcia punktu pracy regulacji.

Regulacja wielostrefowa temperatury jest możliwa również przy wykorzystaniu analogowego wyjścia retransmisyjnego (4…20mA) regulatora prowadzącego (retransmisja wartości zadanej) oraz analogowych wejść zdalnego zadawania regulatorów temperatury odpowiadających za poszczególne strefy grzejne. Rozwiązanie takie umożliwia transmisję wartości zadanej za pomocą sygnału analogowego 4…20mA do innych regulatorów temperatury. Dla każdej strefy może być ustawiona również niezależna wartość przesunięcia punktu regulacji.

Wszystkie produkowane przez japońską firmę Shinko Technos uniwersalne regulatory temperatury i procesu posiadają możliwość wyboru za pomocą klawiatury: algorytmu regulacji (PID, PD, PI, P lub ON/OFF), typu czujnika temperatury lub sygnału analogowego, sposobu działania wyjścia regulacyjnego i alarmowego oraz wielu innych parametrów. Wszystkie regulatory procesowe Shinko Technos wyposażone są w jedno wyjście regulacyjne np. do sterowania procesem grzania lub chłodzenia oraz wyjście zdarzeń (np. do sygnalizacji alarmów, przekroczenia odchyłki lub progu).
Regulatory mikroprocesorowe mogą być wyposażone w wyjście regulacyjne: przekaźnikowe (np. do sterowania stycznikami), wyjście napięciowe logiczne 0/12VDC (do sterowania przekaźnikami półprzewodnikowymi SSR), wyjście analogowe napięciowe lub prądowe (do sterowania falownikami lub napędami zaworów)) lub wyście trójstawne (servo ON/OFF) składające się z dwóch przekaźników do sterowania zaworami regulacyjnymi lub przepustnicami (otwieranie – utrzymywanie położenia -zamykanie), które wyposażone są w napęd elektryczny.
Dodatkowo nasze elektroniczne regulatory temperatury mogą być wyposażone w:
Nasze elektroniczne kontrolery temperatury i termoregulatory mogą być również wyposażone w interfejs komunikacyjny RS232 lub RS485 z protokołem MODBUS ASCII/RTU (do współpracy z panelami dotykowymi HMI, sterownikami PLC, komputerami PC lub systemami SCADA).
Wyjście regulacyjne jest to główne wyjście przeznaczone do sterowania elementami wykonawczymi odpowiadającymi za przebieg procesu regulacji. W zależności od typu regulatora i wymaganego sygnału regulacyjnego dostępne są następujące rodzaje wyjść:
Biorąc pod uwagę trwałość styków przekaźników elektromagnetycznych (ok. 200.000 cykli przy obciążeniu znamionowym i ok. 3.000.000 cykli w przypadku zastosowania zewnętrznego stycznika) zalecane jest ustawienie cyklu proporcjonalnego (przełączania) na min. 30s. Gdy cykl proporcjonalności (przełączania) jest ustawiony na 30s, a wymagana dokładność regulacji wynosi 1°C, szybkość procesu nie powinna być większa niż 1°C/30s. Jeśli szybkość procesu regulacji jest większa od tej wartości, auto-tuning może nie poprawić rezultatów regulacji. Aby uzyskać pożądany efekt regulacji stała czasowa procesu musi być mniejsza niż wcześniej wymieniona wartość (uwzględniając odpowiedź przejściową i zakłócenia).
Zalety: Jest to najbardziej ekonomicznie opłacalny rodzaj wyjścia, umożliwia przełączanie dużych prądy.
Wady: Jeśli cykl proporcjonalności jest zbyt wąski, może wystąpić wypalanie styków przekaźnika lub ich sklejenie.
Zalety: Brak styków mechanicznych, nie ma prawie żadnego skrócenia żywotności.
Wada: Może wystąpić uszkodzenie w wyniku przegrzania przekaźnika SRR.
Wyjście zdarzeń/alarmowe regulatora: Jest to zazwyczaj wyjście przekaźnikowe lub open collector przeznaczone do sygnalizacji stanów alarmowych lub wystąpienie jakiś zdarzeń. Uniwersalne regulatory temperatury i procesu oraz elektroniczne termoregulatory posiadają wyjście(a), którego funkcja jest konfigurowana i może służyć zarówno do sygnalizacji stanów alarmowych (alarmowe) jak i sygnalizacji innych zdarzeń (np. zakończanie programu), przepalenia grzałki, przerwania pętli regulacji (uszkodzenia czujnika lub elementu wykonawczego). Może również pełnić rolę wyjścia sygnału czasu, wyjścia zakończenia programu, wyjścia timera, itp.
Mikroprocesorowy regulator temperatury mierzy prąd płynący przez obwód grzałki za pomocą zewnętrznego przekładnika prądowego CT (przez otwór przekładnika prądowego jest przeprowadzony przewód zasilający grzałkę). Gdy przez grzałkę płynie prąd, przewód wytwarza pole elektromagnetyczne, które następnie generuje napięcie w przekładniku prądowym. Generowane napięcie jest proporcjonalne do przepływającego przez grzałkę prądu. Prąd ten jest mierzony przez regulator i porównywany z ustawioną wartością alarmu przepalenia grzałki.
Jeżeli prąd płynący przez grzałkę spadnie poniżej ustawionego progu zadziałania alarmu, a wyjcie regulacyjne jest aktywne to zostanie uruchomiony alarmu przepalenia grzałki. Za pomocą przekładnika CT może być mierzony tylko prąd zmienny (AC). W przypadku, gdy prąd płynący przez grzałkę jest zbyt mały w porównaniu do prądu nominalnego alarmu (np. prąd grzałki wynosi 0.5A, a przekładnik CT jest na prąd znamionowy 5A (jedna dziesiąta prądu znamionowego), to przewód zasilania grzałki należy przełożyć przez otwór przekładnika CT dwa lub trzy razy. W ten sposób mierzony prąd może być podwojony lub potrojony. Dla grzałek 3-fazowych wymagane jest zainstalowanie dwóch przekładników (CT), po jednym na każdej z dwóch faz.
Elektroniczny regulator temperatury aktywuje alarm przerwania pętli regulacji, gdy wartość regulowana nie wzrośnie w ustawionym czasie o wymaganą wartość, mimo że na wyjściu utrzymuje się maksymalny sygnał regulacyjny (odwrotnie dla chłodzenia) lub wyjście jest włączone. Alarm będzie również aktywowany, gdy wartość regulowana nie spadnie w ustawionym czasie o wymaganą wartość, mimo że na wyjściu na wyjściu utrzymuje się minimalny sygnał regulacyjny (odwrotnie dla chłodzenia) lub wyjście jest wyłączone.
Opcjonalnie mikroprocesorowy regulator temperatury może być wyposażony w dodatkowe wyjście regulacyjne, którego działanie jest odwrotne do działania głównego wyjścia regulacyjnego i służy do sterowania chłodzeniem (i vice versa). Dla działania chłodzenia mogą zostać wybrane różne charakterystyki chłodzenia np. chłodzenie powietrzem (charakterystyka liniowa), wodą lub olejem. Działanie wyjść grzania i chłodzenia może nachodzić na siebie (regulacja ze strefą pokrycia) lub też może być rozdzielone (regulacja ze strefą martwą). Dostępne typy wyjść sterujących chłodzeniem są zazwyczaj takie same jak typy wyjść grzania tzn. przekaźnikowe, napięciowe logiczne (do SSR) oraz analogowe liniowe (prądowe lub napięciowe).
Opcjonalnie nasz uniwersalny regulator temperatury może być również wyposażony w wyjście analogowe przeznaczone do retransmisji wartości mierzonej, wartości zadanej, sygnału regulacyjnego lub odchyłki do innych urządzeń (np. mierników lub rejestratorów). Dostępne są następujące typy wyjścia retransmisyjnego: prądowe 0/4…20mA lub napięciowe 0…1V, 1…5V, 0…10V).
Opcjonalnie nasze elektroniczne regulatory temperatury mogą być wyposażone w interfejs komunikacyjny RS232 lub RS485 (z protokołem producenta lub Modbus RTU/ASCII) przeznaczony do komunikacji z komputerem, sterownikami PLC, panelami HMI, itp. Umożliwia to zdają konfigurację urządzeń, monitoring oraz archiwizację przebiegu kontrolowanego procesu.
Nasze programowalne regulatory temperatury mogą być również wyposażone funkcję cyfrowej transmisji wartości zadanej. Umożliwia to transmisję wartości zadanej w postaci cyfrowej z regulatora programowalnego do innych regulatorów temperatury (max 31) z interfejsem komunikacyjnym RS485. Funkcja ta umożliwia zdalne sterowanie nastawami wielu regulatorów (stref regulacyjnych) z jednego regulatora.

Przemysłowe regulatory temperatury (termoregulatory, sterowniki) mogą być również wyposażone w wejście analogowe (napięciowe 1…5V lub prądowe 4…20mA) przeznaczone jest do zdalnego zadawania wartości zadanej procesu. Opcja ta jest najczęściej wykorzystywana podczas regulacji kaskadowej, gdzie analogowy sygnał regulacyjny z jednego regulatora jest sygnałem zadającym wartość zadaną dla drugiego regulatora lub też, gdy wartość procesu regulacji jest zadawana z innych urządzeń (np. sterownika PLC).
Nasze cyfrowe regulatory i sterowniki temperatury mogą być wyposażone wejścia binarne (cyfrowe) przeznaczone są do zdalnego sterowania pracą regulatora za pomocą sygnałów logicznych. Wejścia binarne mogą służyć m.in. do:
Elektroniczne regulatory temperatury i sterowniki mogą być również wyposażone w wyjście zasilania 24VDC (30mA). Wyjście to przeznaczone jest do zasilania dwuprzewodowych przetworników podłączonych do wejścia pomiarowego regulatora. Umożliwia to zasilanie podłączonego przetwornika np. (przetwornika wilgotności, przetwornika ciśnienia, itp.) bezpośrednio z regulatora.
W naszej ofercie znajdują się różnego rodzaju przemysłowe regulatory temperatury, elektroniczne termoregulatory PID, cyfrowe kontrolery temperatury, regulatory programowalne i procesowe japońskiej firmy Shinko Technos. Są to gównie regulatory panelowe (do zabudowy tablicowej w szafach i panelach sterowniczych), jaki również regulatory temperatury i termoregulatory do montażu na szynie DIN (TS35).
Zobacz również inne elektroniczne i wielofunkcyjne urządzenia znajdujące się w naszej szerokiej ofercie. Są to głównie: tablicowe regulatory temperatury z algorytmem PID, uniwersalne termoregulatory, przemysłowe kontrolery temperatury i procesu, programowalne regulatory do wypału ceramiki, mierniki tablicowe, przetworniki wilgotności oraz wielokanałowe i uniwersalne rejestratory temperatury, itp.
Oferowane oferowane przez nas elektroniczne regulatory temperatury ze względu na swoje funkcje i możliwości mogą znaleźć szereg zastosowań w różnych urządzeniach, aplikacjach przemysłowych, laboratoriach i nie tylko. Głównie nasze uniwersalne regulatory temperatury i termoregulatory znajdują zastosowane w:
Powyższe informację, a także pozostałe materiały zawarte na naszych podstronach mają na celu przede wszystkim przybliżenie podstawowych informacji i pojeść związanych z regulacji temperatury i innych wielkości procesowych. A także poszerzenie wiedzy na temat rodzajów regulatorów, budowy regulatorów, algorytmów regulacji temperatury, itp. Ponadto powyższe informacje miały również odpowiedzieć ma często stawiane pytania związane z sterowaniem i regulacją temperatury, np.:
A także wiele innych. Zapraszamy do zapoznania się z szczegółowymi informacjami zawartymi na naszej stronie http://acse.pl lub inne regulatory temperatury stronie Shinko Technos.






